|
Georgy Ponimatkin
I am a Ph.D. student at the Inteligent Machine Perception lab at CIIRC CTU, supervised by Josef Sivic.
I obtained my master's degree in high energy physics at CTU Prague, where I worked at the STAR experiment at the Brookhaven National Lab. I also spent two and half years at the IMAGINE team at Ecole des Ponts ParisTech.
Email /
CV /
Google Scholar /
Github
|

|
|
Research
Currently my research is focused on Vision-Language-Action models and ways to improve their generalizability for robotic manipulation. Previously I worked mainly on 6D pose estimation and unsupervised video object segmentation.
|
|
|
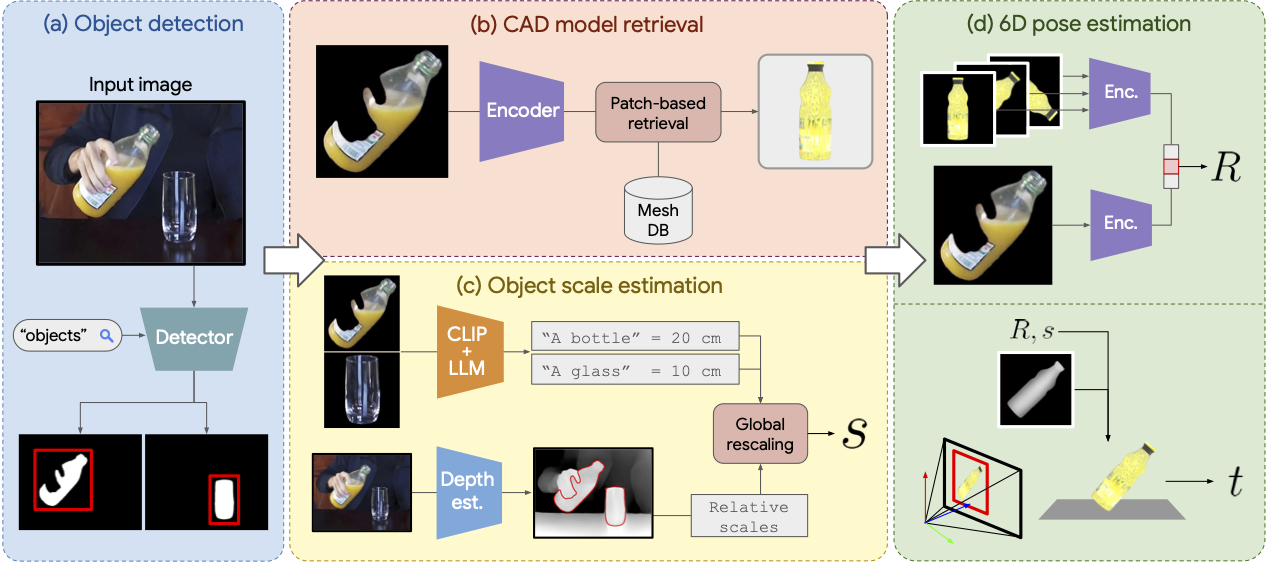
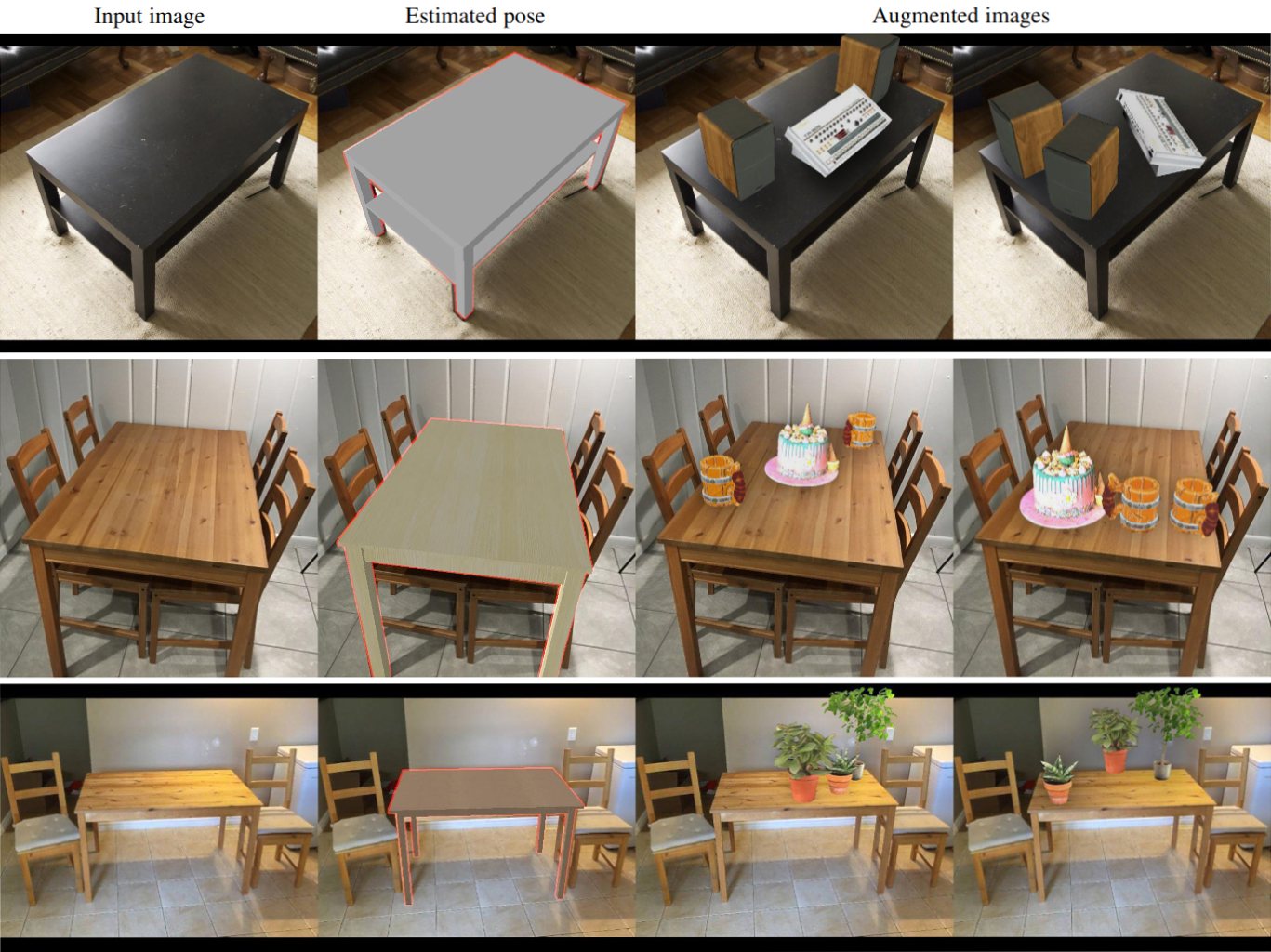
6D Object Pose Tracking in Internet Videos for Robotic Manipulation
Georgy Ponimatkin*,
Мartin Cífka*,
Tomáš Souček,
Médéric Fourmy,
Yann Labbé,
Vladimír Petrík,
Josef Sivic
ICLR 2025
paper /
arxiv /
code
A method to estimate 6D pose of the object in the wild given an approximate mesh.
|
|
|
FocalPose++: Focal Length and Object Pose Estimation via Render and Compare
Мartin Cífka*
Georgy Ponimatkin*,
Yann Labbé,
Bryan Russell,
Mathieu Aubry,
Vladimír Petrík,
Josef Sivic
TPAMI 2024
paper /
arxiv /
code
An extended render and compare method for 6D pose estimation in uncalibrated settings.
|
|
|
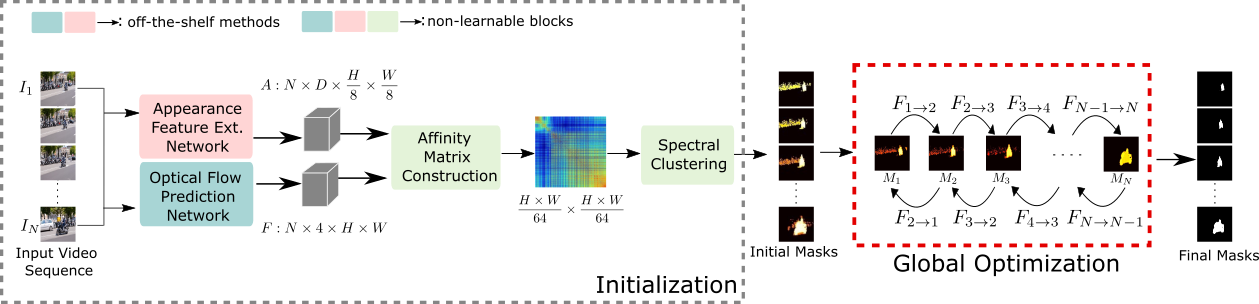
A Simple and Powerful Global Optimization for Unsupervised Video Object Segmentation
Georgy Ponimatkin,
Nermin Samet,
Yang Xiao,
Yuming Du,
Renaud Marlet,
Vincent Lepetit
WACV 2023
paper /
arxiv /
code
Spectral clustering method for unsupervised video object segmentation.
|
|
|
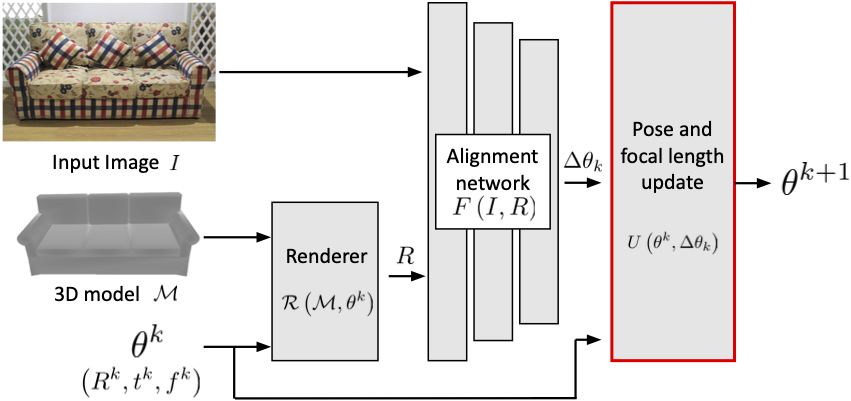
Focal Length and Object Pose Estimation via Render and Compare
Georgy Ponimatkin,
Yann Labbé,
Bryan Russell,
Mathieu Aubry,
Josef Sivic
CVPR 2022
paper /
arxiv /
code
A render and compare method for 6D pose estimation in uncalibrated settings.
|
|
|
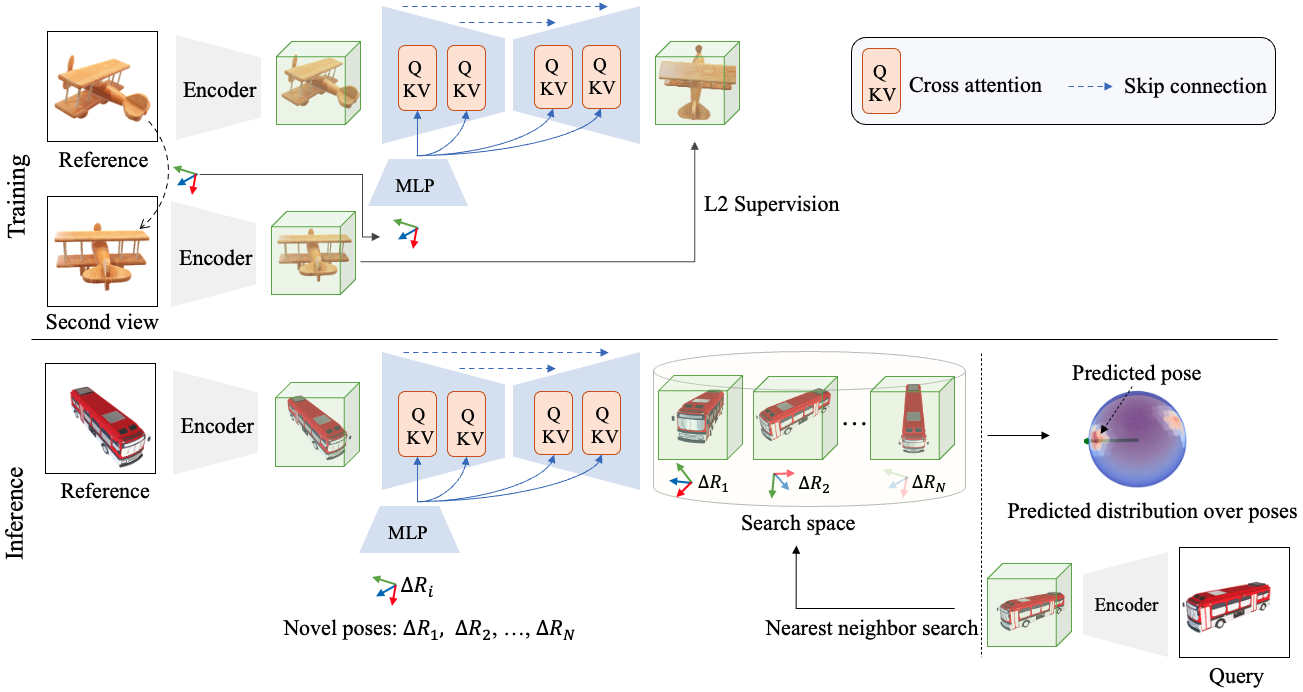
NOPE: Novel Object Pose Estimation from a Single Image
Van Nguyen Nguyen,
Thibault Groueix,
Georgy Ponimatkin,
Yinlin Hu,
Renaud Marlet,
Mathieu Salzmann,
Vincent Lepetit,
CVPR 2024
paper /
arxiv /
code
A single reference image relative pose estimator for unseen objects.
|
|
|
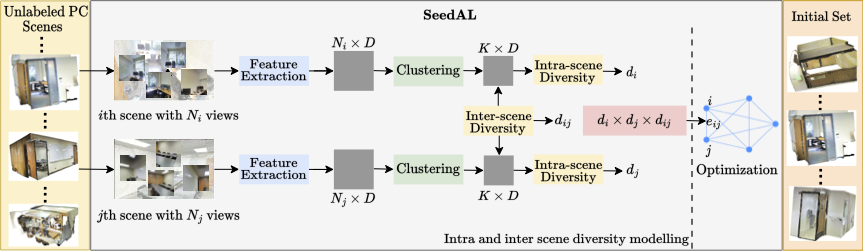
You Never Get a Second Chance To Make a Good First Impression: Seeding Active Learning for 3D Semantic Segmentation
Nermin Samet,
Oriane Simeoni,
Gilles Puy,
Georgy Ponimatkin,
Renaud Marlet,
Vincent Lepetit,
ICCV 2023
paper /
arxiv /
code
An active learning method for point cloud semantic segmentation.
|
|
|
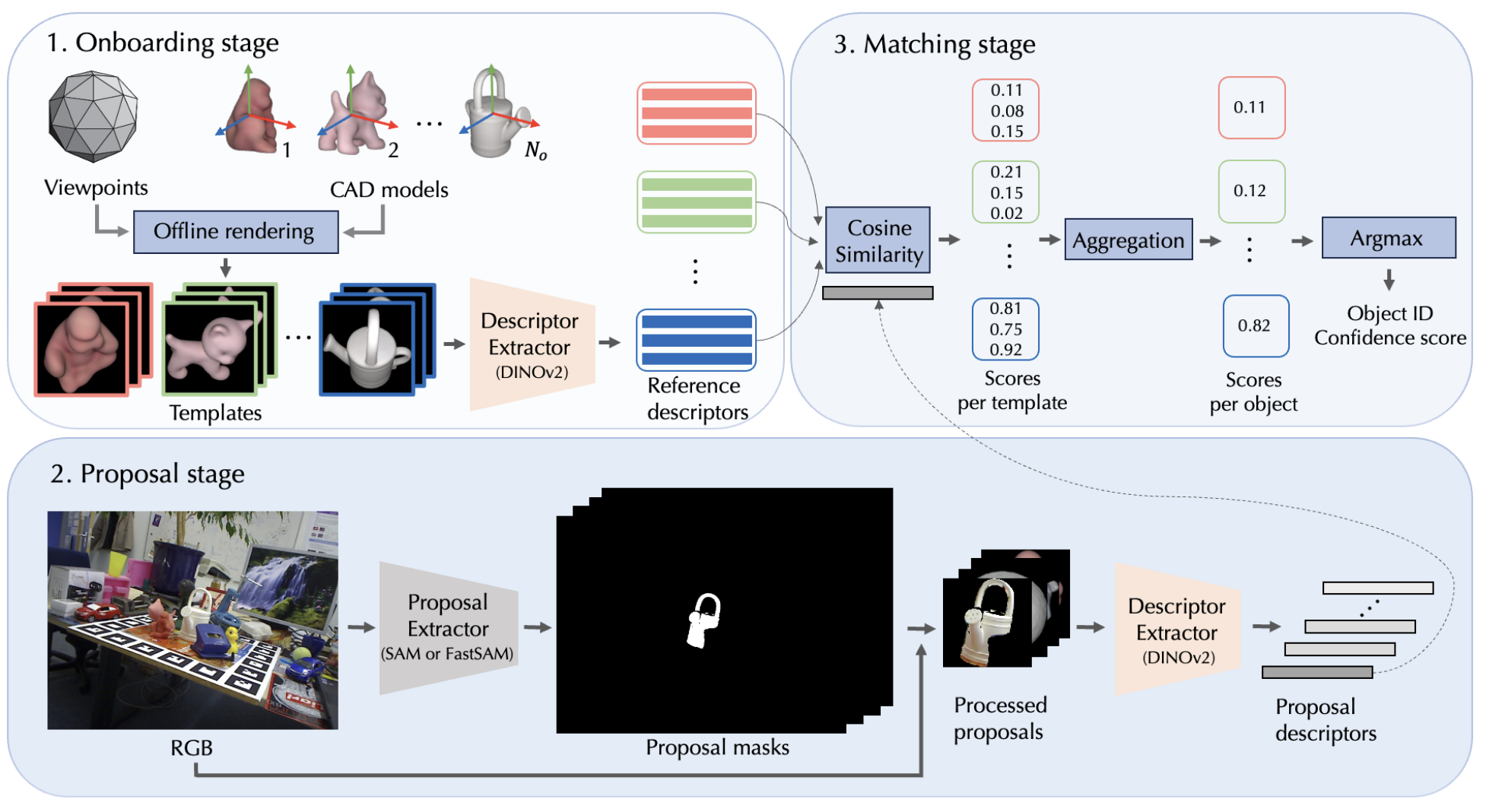
CNOS: A Strong Baseline for CAD-based Novel Object Segmentation
Van Nguyen Nguyen,
Thibault Groueix,
Georgy Ponimatkin,
Vincent Lepetit,
Tomas Hodan
ICCV R6D Workshop 2023
paper /
arxiv /
code
An unseen object detector baseline for BOP Challenge.
|
|
Reviewing
|
CVPR, ECCV, WACV, ACCV, 3DV, NeurIPS, ICLR
|
This website is based on the template provied by Jon Barron.
|
|